

Il progetto di ricerca MEC-View, con a capo Bosch, presenta i risultati
Tra pedoni poco visibili, ciclisti che sbucano all’improvviso e autobus che si fermano al centro della strada, il traffico urbano può diventare stressante e pericoloso. Da qui l’idea, alla base del progetto di ricerca MEC-View, di fornire ai veicoli autonomi una visione d’insieme della viabilità utilizzando i lampioni posizionati lungo le strade.
Durante lo studio i lampioni, dotati di sensori video e lidar, hanno utilizzato la tecnologia mobile avanzata e sono stati così in grado di fornire ai veicoli informazioni critiche, in tempo reale, consentendo di rilevare gli ostacoli in modo rapido e affidabile. Dopo oltre tre anni di sviluppo, il progetto è pronto per presentare i risultati. I partner del progetto, con Bosch a capo del consorzio, Mercedes-Benz, Nokia, Osram, TomTom, IT Designers e le Università di Duisburg-Essen e Ulm hanno ricevuto finanziamenti per 5,5 milioni di euro dal Ministero federale tedesco per gli affari economici e l’energia (BMWi). La città di Ulm, partner associato del progetto, negli ultimi tre anni è stata il banco di prova per lo studio. Le conoscenze acquisite verranno ora utilizzate per sviluppare ulteriormente la tecnologia dei veicoli, della guida autonoma e della tecnologia mobile. Inoltre, l’infrastruttura realizzata sarà a disposizione per ulteriori progetti di ricerca.
Panoramica dall’alto per una migliore visione d’insieme
Dai lampioni, con un’altezza massima di sei metri, si ha una chiara panoramica di ciò che accade negli incroci trafficati. I sistemi installati nel veicolo con telecamere, radar e sensori lidar consentono una visione a 360 gradi precisa. Tuttavia, la visuale da terra – dal solo veicolo – non è sempre sufficiente per vedere, per esempio, un pedone coperto temporaneamente da un camion, un veicolo che proviene da una entrata nascosta o un ciclista che si avvicina all’auto e cambia corsia rapidamente. “Poiché il veicolo stesso non può vedere dietro gli angoli o attraverso i muri, utilizziamo i sensori del lampione per estendere il campo visivo dei sensori del veicolo” ha dichiarato Rüdiger Walter Henn, capo progetto MEC-View presso il leader del consorzio Bosch. I partner hanno sviluppato l’hardware e il software che rispondono a tale scopo: il sistema elabora le immagini e i segnali dai sensori dell’infrastruttura, li combina con mappe digitali ad alta risoluzione e le trasmette al veicolo via etere. I dati si uniscono con le informazioni del sensore del veicolo per creare un quadro accurato della situazione.


Trasmissione dati wireless
La tecnologia mobile avanzata rende possibile la trasmissione a bassissima latenza delle informazioni del sensore. Mentre per il progetto MEC-View si è utilizzata la tecnologia di comunicazione mobile LTE con una configurazione ottimizzata per questo scopo, nel nuovo standard di comunicazione 5G, la trasmissione dei dati in tempo reale è una funzione di base. Il compito principale delle comunicazioni mobili ottimizzate per la latenza non è solo la trasmissione wireless dei dati praticamente istantanea, ma anche l’elaborazione di tali dati il più vicino possibile alla fonte. Questa attività viene eseguita da computer speciali, noti come server mobili edge computing, che sono integrati direttamente nella rete moblie e combinano i dati del sensore del lampione con i dati dei sensori surround di un veicolo e mappe digitali altamente accurate. Da ciò, generano un modello dell’ambiente circostante che include tutte le informazioni disponibili aggiornate sulla situazione del traffico. In futuro, i centri di controllo del traffico cittadino potrebbero essere dotati di tali server in modo che possano condividere i dati con tutti i veicoli.
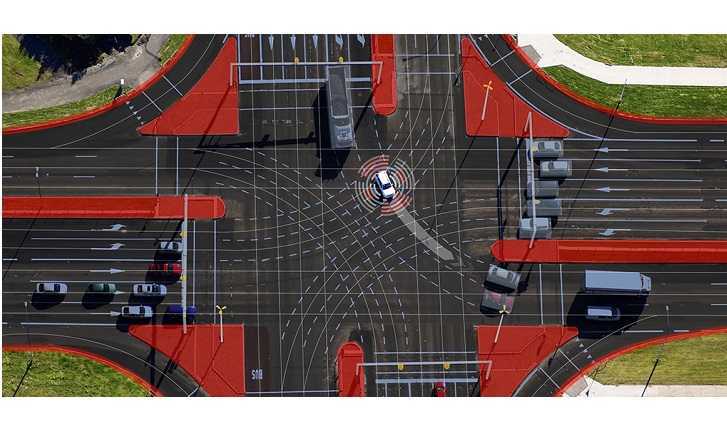
Perfettamente integrato con il traffico
A Ulm, i partner del progetto hanno testato l’interazione di prototipi di veicoli autonomi e sensori di infrastruttura in condizioni di traffico reale dal 2018. Un incrocio nel distretto di Lehr di Ulm è noto per la mancanza di visibilità a 360 gradi. I lampioni erano dunque dotati di sensori per aiutare i veicoli autonomi a superare l’incrocio, quando da una strada laterale si immettevano su quella principale. Grazie alla nuova tecnologia sviluppata, il prototipo a guida autonoma riconosce subito gli utenti della strada e può adattare di conseguenza la strategia di guida.






